
3D CAMERA & SENSOR TECHNOLOGY
หลักการทำงานของรูป 3 มิติ คือ การถ่ายภาพที่วัตถุเดียวกันในมุมที่ต่างกันเล็กน้อย หลังจากนั้นจึงใช้เทคนิคของ การดูภาพ 3 มิติ วิธีใดวิธีหนึ่ง เพื่อส่งภาพแต่ละภาพ ให้ตาทั้งสอง ซึ่งภาพจะถูกผสมรวมกันในสมองของเราอีกครั้งหนึ่ง ทำให้เราเห็นภาพดังกล่าว ในลักษณะ 3 มิติ (http://www.rmutphysics.com/)

ปัจจุบัน เทคโนโลยี 3D ได้เข้ามามีส่วนเกี่ยวข้องในงานภาคอุตสาหกรรมมากขึ้น เพื่อตอบโจทย์ในการลดต้นทุน เพิ่มผลผลิต, ลดของเสีย, ลดจำนวนคนปฏิบัติงาน, ลดความผิดพลาดจากมนุษย์ (Human error) หรือเพิ่มประสิทธิภาพในงานที่ต้องการความละเอียดสูง ซึ่งเทคโนโลยี 3D ในปัจจุบันนั้น มีหลายรูปแบบเพื่อให้สอดคล้องกับงานที่จะนำไปใช้ โดยอาจสามารถจำแนกรูปแบบเทคโนโลยีดังนี้
Time of Flight Technology
Time of Flight หรือ TOF เป็นอุปกรณ์ตรวจจับภาพ 3 มิติ ที่ใช้หลักการการคำนวณเวลาเดินทางของแสง(Infrared light) จากแหล่งกำเนิดไปกระทบวัตถุแล้วกลับมาเข้าที่ Sensor โดยแยกระยะของวัตถุด้วยเวลา ยิ่งระยะไกลขึ้น แสงก็จะใช้เวลามากขึ้นในการเดินทาง
โดยอุปกรณ์แบบ TOF เหมาะสำหรับงานที่ต้องการความเร็วสูง แต่ไม่ต้องการระยะที่แม่นยำมากนัก (-+ 1 cm) เช่น การตรวจวัดปริมาตรบรรจุภัณฑ์ , การตรวจสอบการเคลื่อนไหวของมนุษย์ เป็นต้น

Time of Flight concept
https://medium.com/decodein/the-time-of-flight-camera-is-shaping-the-future-f47806aba135
รวมไปถึง Lidar technology ซึ่งมีหลักการเดียวกับ TOF แต่แหล่งกำเนิดนั้นเป็นคลื่นแสง NIR ซึ่งมีความทะลุทะลวงมากกว่า โดยมีช่วงความยาวคลื่นอยู่ที่ 800 - 2,500 นาโนเมตร โดย Lidar technology ได้ถูกนำไปใช้เป็น Sensor ให้กับระบบต่างๆ อาทิ เช่น การสร้างแผนที่ในระบบยานยนต์อัจฉริยะ - ยานยนต์ไร้คนขับ , การวิเคราะห์ผลผลิตทางเกษตรกรรม ,การสำรวจแหล่งน้ำ-ภูมิประเทศและสิ่งปลูกสร้าง เป็นต้น

Lidar technology
https://www.youtube.com/watch?v=zREAEdXzOcw

Time-of-Flight Technology Meets Labeling Robot
https://www.youtube.com/watch?v=zREAEdXzOcw

Map laser scanner
https://www.youtube.com/watch?v=zREAEdXzOcw
กล้อง Sensor แบบ TOF และ LIDAR ในท้องตลาด

Basler blaze & Basler blaze RGB-D
https://www.baslerweb.com/en/products/cameras/3d-cameras/

Terabee 3D Cam
https://www.terabee.com/sensors-modules/

Intel LiDAR Camera
https://www.intelrealsense.com/lidar-camera-l515/
Laser Triangulation / Laser profiler

Laser Triangulation Technology
https://www.mdpi.com/1424-8220/17/8/1791
การตรวจจับภาพแสงสะท้อนจาก Laser
Sensor ประกอบด้วยกล้องรับภาพ และ Laser โดย Laser จะติดตั้งทำมุมสามเหลี่ยมกับกล้องรับภาพ หลักการทำงานคือ Laser จะฉายแสงไปที่ชิ้นงานจากนั้นจะสะท้อนภาพเข้ามาที่กล้อง โดยภาพที่เข้ามาที่กล้องจะแตกต่างกัน ขึ้นอยู่กับระยะความสูงของชิ้นงาน หลักการวัดขนาดแบบนี้เรียกว่า Laser Triangulation ข้อดีของระบบเลเซอร์แบบ Triangulation คือ เลเซอร์จะส่งแสงผ่านตัวขยายแสงซึ่งทำให้แสงเลเซอร์มีความเข้มสูง สามารถตรวจจับวัตถุชิ้นเล็กๆ ได้อย่างแม่นยำ
โดยอุปกรณ์ แบบ Laser Triangulation เหมาะกับงานเช่น การตรวจวัดรอยเชื่อม, การดูความสมบูรณ์ของรางโลหะรีดยาว การตรวจความสมบูรณ์แผงวงจร , ตรวจขนาดของตะกั่วบัดกรี, ตรวจตัวอักษรนูน และลายของยางรถยนต์ เป็นต้น

KEYNCE Laser profiler
https://www.keyence.eu/products/measure/laser-2d/
White-light interferometry

White-light Technology
https://www.polytec.com/eu/surface-metrology/technology/white-light-interferometry
White-light interferometry คือ การสร้างภาพ 3D ด้วยความเข้มแสงขาวตามหลักการ Michelson interferometry โดยมีหลักการทำงานคือ เมื่อมีการจ่ายแสงจากแหล่งกำเนิด มากระทบกับกระจกแยกลำแสง (Beam splitter) จะแยกลำแสงเป็นสองขบวน โดยขบวนแรกจะเดินทางไปกระทบผิววัตถุ และสะท้อนกลับมาหากล้อง ส่วนอีกขบวนจะเดินทางไปสะท้อนกับกระจก Reference plane แล้ววิ่งกลับมาสะท้อนกระจกแยกลำแสงอีกครั้ง แล้วตรงไปหากล้อง
โดยหากระยะการเดินทางของแสงไปกระทบวัตถุ เท่ากับระยะการเดินทางของแสงที่ไปสะท้อนกับกระจก Reference plane จะทำให้เกิดการแทรกสอดของแสง ทำให้แสงที่กล้องรับได้นั้นมีความเข้มแสงขาวมาก

Sensor แบบ White-Light นั้นถูกนำไปใช้กับเครื่องวัดพื้นผิววัตถุที่ต้องการความสามารถในการสแกนแบบละเอียดสูง เช่น เครื่อง 3D Surface Profiler จาก KEYNCE เป็นต้น

3D Surface Profiler VK-X3000 series
https://www.keyence.com/ss/products/microscope/vk-x3000/
Stereo Camera (Structured Light)

Stereo Camera คือ วิธีการถ่ายภาพตามลำดับโดยใช้รูปแบบของแสงที่ต่างกัน(Structured Light) เพื่อสร้าง 3D point cloud บนพื้นผิวของวัตถุ ซึ่งข้อจำกัดของวิธีการนี้คือ วัตถุต้องหยุดนิ่งขณะถ่ายภาพเท่านั้น
โดย Structured light ใช้การสะท้อนของรูปแบบแสงที่ฉายบนวัตถุเพื่อสร้าง 3D point cloud ของพื้นผิววัตถุ จากนั้นกล้องสเตอริโอจะทำการถ่ายภาพเพื่อให้ได้ความแม่นยำและความเสถียรของเซ็นเซอร์
Stereo Camera ถูกนำไปใช้ในงานหลายรูปแบบ เช่น การติดกล้องเพื่อสื่อสารกับ Robot (Robot bin picking), autonomous drones, AR/VR, smart home devices
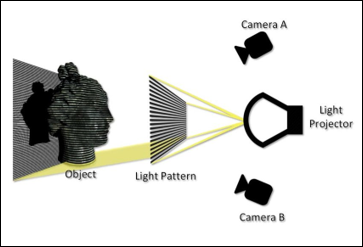
https://www.researchgate.net/figure/Working-principle-of-structured-light-scanner_fig2_320657865

https://www.solomon-3d.com

https://www.ensenso.com/portfolio-item/n3x/

https://www.thailand.intel.com/content/www/th/th/architecture-and-technology/realsense-overview.html
เปรียบเทียบข้อดี-เสียของ 3D Camera / Sensor

